单稳四面体模型作为几何学和物理学交汇的重要成果,近年来在科学界引起了广泛关注。与传统的四面体不同,单稳四面体凭借其独特设计,拥有只会稳定停留在一个面的特性,这种奇特现象激发了学者们对稳定性和形状设计深度理解的兴趣。本文将立足于其产生背景、结构机理、实验实践和未来应用,带您深入了解这一新颖的几何形体。 单稳四面体最早的概念源自对稳定性问题的研究。传统的四面体具有四个等价的三角形面,每个面都有可能作为支撑面,从而导致不同的稳定状态。然而,科学家们对是否存在一种几何形状保持单一稳定面产生了浓厚兴趣,挑战传统几何的固有认知。
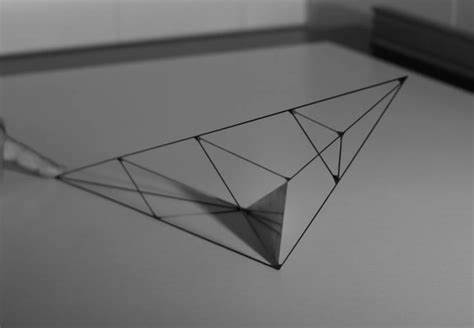
近期,一篇发表在知名预印本平台arXiv的论文将这一理论付诸实践,成功构造出了这样的模型,引发了科技媒体如Quanta Magazine的报道,广泛传播了该发现。 该模型通过对四面体的顶点和边角进行精密调整,改变了重心和支撑面的几何条件,使得除了一个面以外,其他面均处于不稳定状态。这种形状在物理上表现为无论从哪个面跌落,都会自动滚动并最终停留在唯一稳定的面上。通过这种设计,单稳四面体成为经典力学中稳定性与形状关系的优秀案例,既有理论价值,也具备实用潜力。 上世纪八十年代,英国剑桥大学的科学家Bob Dawson与另一位研究者合作,将这一理念用铅箔和竹片制作成实体模型。虽然最初的模型遗失,但他们的工作奠定了后续研究的基础。
近日,独立研究者重新制作模型,并在YouTube等平台分享了实验视频,生动展示了单稳四面体独特的滚动过程和最终稳定态。视频中,四面体在斜面上静止,但一旦放置于水平面,便会发生连续滚动,最终稳稳落在特定的面上,这一过程验证了理论的有效性。 单稳四面体的设计依赖于精准的角度切割和重量分布调整。设计者需要计算各个面的倾斜度,重心位置,以及材料分布密度,以确保除了目标稳定面外,其余面无法支撑物体的稳固平衡。这不仅是几何学的挑战,同时也涉及物理力学中的力矩和平衡理论。模型的成功制造体现了多学科知识的融合,既涵盖了数学优化,也需考虑实际物理参数。
在科学研究中,单稳四面体模型不仅是理论验证的利器,也为稳定性分析提供了新视角。其设计理念可拓展至机器人设计中,如制作只需以特定面着地即可保持稳定的机器人零部件。此类结构可用于自动化系统,确保机器在跌倒或状态改变后能自动恢复预定位置,提升系统鲁棒性。此外,教育领域也能借助单稳四面体作为物理和数学课的实验模型,激发学生兴趣,理解力学稳定性原则。 单稳形状的设计理念不仅局限于四面体,更启示了更复杂几何体的开发。研究人员正持续探索其他多边形和多面体的单稳形态,力图设计出更多具有单一稳定状态的几何物体。
这些进展有望在工程、建筑以及材料科学领域带来突破,例如开发自我定位的构件或能自动调整姿态的结构材料。 此外,单稳四面体模型的成功让大家重新审视了复杂形状与稳定性之间的微妙关系,突破了仅靠对称性思考稳定性的传统范式。通过非对称和巧妙设计,稳定状态可以被人为设定和控制。这代表了结构设计中对稳定性微调的新时代,有望催生创新产品和技术。 总结而言,单稳四面体模型不仅体现了几何学、物理学和材料科学的深度融合,也代表了科学家们不断挑战和拓展传统知识边界的精神。随着相关研究的深入和技术手段的提升,未来这种具有单一稳定面的几何体将在多个领域展示其独特价值和广泛应用。
关注单稳四面体,我们能更好地理解稳定性背后的科学奥秘,感受形状设计带来的无限潜能。