章鱼是一种极具智慧和适应性的海洋生物,以其灵活多变的八条臂而闻名。在研究人员的深入观察中发现,章鱼不仅仅是用它们的触腕进行简单的抓握和移动,更是在不同的情境下灵活运用每一条触腕,分别承担不同的任务。这种独特的分工协作现象不仅丰富了我们对章鱼行为的认识,也为软体机器人技术的发展启迪了思路,尤其是在灾难救援和复杂环境作业领域。章鱼的八条触腕结构极为复杂,其内部由四组肌肉环绕中央神经组成,没有骨骼的限制,使触腕能够进行弯曲、伸缩、扭转等多维度的变化。这种灵活性和控制度远超其他动物,没有任何类似生物能比拟章鱼在触腕上的控制能力。美国佛罗里达大西洋大学海洋科学实验室的海洋生物学家切尔西·贝尼斯指出,章鱼各臂不仅能够独立自主行动,更能同时协调完成多重任务,这得益于每条臂内高密度的神经系统和精细的肌肉排列。
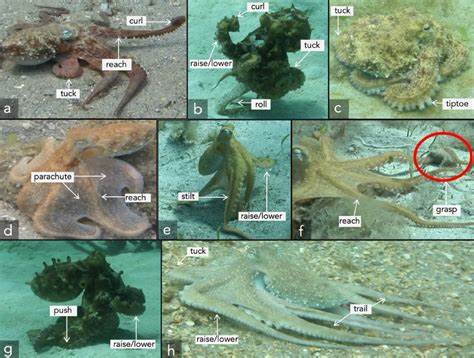
最新发布在《自然科学报告》杂志上的研究汇集了超过25段章鱼在野外自然栖息地的视频资料,科学家们借此追踪分析章鱼八臂在15种不同行为中的运用模式。结果显示,章鱼并没有传统认知中的"左右手偏好",而是表现出前后臂的功能侧重。具体来说,章鱼更倾向于用前四条臂来执行探索、抓取和精细操作这些高精度行为,而后四条臂则更多用于支撑运动、推挤和帮助移动。研究团队发现,前臂的使用频率高达64%,而后臂则约占36%,说明章鱼的大脑与触腕系统对功能分工有着明确且高效的组织结构。前臂在发现猎物、探查环境时承担主导作用,比如伸展、夹取、卷曲等动作。而后臂则更多用于章鱼移动时的"支撑"和"滚动"行为,即通过伸展像拐杖一样撑起身体,或在行走过程中将触腕卷拢推动身体前进。
这种差异化的运动模式是章鱼适应多变海洋环境的关键。除了这些行为,科学家们还观察到章鱼触腕能进行更多复杂的动作,如手指般的抓握、远距离伸展、360度的弯曲和精准的表面接触,这些动作让章鱼在捕食、躲避以及与环境互动时游刃有余。此外,研究还揭示出在一条触腕上,不同部位的动作分布也具有明显特征,中段和尖端部位在操作精度和动作幅度上表现不同,这让章鱼能够像人类灵巧的手指一样,实施细致入微的控制。对人类而言,理解章鱼触腕的结构与控制模式,不仅丰富了对脑与肢体协调的生物学认知,也为工程技术带来革命性的借鉴。尤其是在当前软体机器人研发领域,如何设计具备高度柔韧性和复杂动作能力的机械臂,一直是技术难点。章鱼触腕凭借其无骨骼结构和分布式神经网络,实现了异常灵活且精准的动作控制,被视为理想的生物蓝本。
位于伍兹霍尔海洋生物实验室的动物行为学家罗杰·汉隆博士指出,在现实生活中,软体机器人若能模仿章鱼触腕的多功能性和灵活性,便可用于复杂环境的搜索与救援,特别是在地震和建筑倒塌等灾难场景中,机器人能够通过狭窄缝隙进入受困区域,递送药物、水或通信设备,甚至进行生命探测。这类机器人无需刚性结构,动作更为柔和,能够适应复杂且不规则的空间条件,极大提升救援效率和安全性。同时,章鱼触腕的灵活控制对未来人机交互、微操控设备设计也具有启发意义,可推动医疗器械、探索机器人等领域的创新发展。除此之外,章鱼精细的动作模式还体现了自然界中神经网络与肌肉系统的协同进化,这一领域的深入研究,将有助于理解神经科学和生物机械学的复杂关系,从根本推动仿生机器人和智能控制的发展。作为八腕策略的典范,章鱼通过将不同的臂赋予特定角色,实现了个体动作效率和环境适应性的最大化。这种分工不仅仅是简单的机械安排,更是一种高度进化的生物智慧体现。
它提醒我们,自然界中的复杂生命形态往往蕴含着深刻的设计原则,值得人类科技反复探索和模仿。未来,随着对章鱼触腕研究的不断深入,结合人工智能和材料科学的进步,软体机器人将在灾害救援、医疗辅助、探索探测等多个领域发挥日益重要的作用。借鉴章鱼,以八臂之巧助力人类,将开辟生命科学与工程技术的崭新篇章。 。