随着智能家居和自动化设备的普及,割草机器人逐渐成为庭院绿化的重要帮手。Robomow RX和RT系列作为入门级机器人割草机,因其强大的功能和实惠的价格获得不少用户青睐。然而,二手Robomow RX/RT割草机器人常常缺少关键的边界线信号发生器,这使得机器人无法进行正常工作。边界线信号发生器是割草机器人识别院子边界和回充基站的关键设备,缺失后机器人的实用价值大打折扣。面对原厂替换部件价格高昂的问题,由ESP32开发板和简单音频放大模块构建的自制边界线信号发生器成为解决方案之一。本文将详细介绍此方案的动机、逆向工程过程、硬件搭建及实测效果,带您了解如何让这些被遗弃的割草机器人重新焕发生机。
消费者购买原厂配件价格常令人望而却步,单个基站价格高达150欧元以上,主板和其他零部件价格更是接近整机一半甚至超过,出于经济考虑,许多用户不惜放弃使用。而边界线信号发生器的缺失正是导致这些二手机器无人问津的主要原因。逆向工程是一种破解此难题的途径,首先,通过连接示波器监测工作中的边界线信号发生器输出,确认信号的频率约为3000赫兹,电压峰峰值约为2伏左右。进一步测试电路参数表明,信号发生器基本上目标是在边界线回路中推送150到200毫安的有效电流,以产生足够磁场便于割草机器人感应定位。信号形态具有特定的波形,经过数据采集整理,再用滤波器平滑优化,确保数字波形能够准确模拟原始信号。通过Python脚本对采集流水线数据进行分析处理,计算出信号频率并固定在3007赫兹,确保输出波形稳定无抖动。
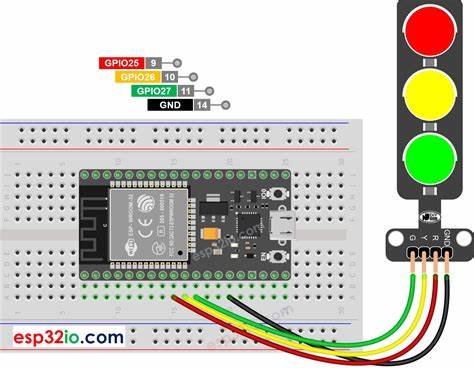
接下来将波形转换为ESP32数字模拟转换器(DAC)能够播放的数字数组,分辨率设定为1024个采样点,幅度调节到0到255的8位数字范围。硬件搭建方面,选用常见的ESP32开发板作为信号产生核心,利用其内建DAC功能输出边界信号。配合廉价易得的LM386音频放大模块增强信号功率,通过串联一个约7欧姆的电阻保护输出端口,保证放大器和边界线的稳定匹配。边界线回路通常是一根标准电线组成的闭合回路,其长度和安装方式根据庭院大小灵活调整,确保信号能覆盖机器人工作区域。实际测试阶段,在控制环境中布置约1.5米直径的临时回路,用数字万用表测量放大后线圈电流,调整放大器音量直至电流达到大约125毫安有效值。测试现场使用Robomow RT300实际放入回路,操作机器人开始按"回基地"功能,观察其是否能正确识别信号和自动沿边界线行走。
结果显示机器人能够准确识别自制信号产生的边界线,并沿线行驶完成定位任务。在未设置终止条件的情况下,机器人持续绕回路运动,并可正常进行割草工作,证明信号强度和稳定性满足实际使用需求。更有趣的是,通过软件反转输出信号极性,能够将边界线变成禁止进入区域(keep-out zone),方便用户自主划分草坪中的保护区,防止机器人进入特定区域造成意外。软件部分,代码采用开源Arduino开发框架编写,利用ESP32的DAC持续输出预设数字波形,结合简易音频放大电路完成边界信号再现。该项目为开源业余爱好者贡献,代码简单易懂,接受社区贡献和功能优化提案。随着项目的推进,目标不仅停留在信号发生器阶段,还计划集成智能充电功能,模拟原厂基站自动开关边界信号和充电电压,实现节能和减少电磁干扰。
同时,开发Wi-Fi模块将增加远程监控和智能家居联动能力,使这些入门级割草机器人具备连接Home Assistant等智能平台的潜力。基于ESP32的边界线信号发生器以其低成本、强大灵活、易于改造受到DIY爱好者和机器人修复者的欢迎。它不仅为保护资源和环保贡献力量,也让更多用户能以极低成本恢复这些性能稳定的割草机器人,享受现代园艺智能化的乐趣。尽管这是一个非官方项目,且未得到Robomow及相关品牌授权,用户使用需自行承担风险,产品适用范围局限于非商业或安全关键场景。未来,随着社区不断贡献和完善,有望推出更完善、更智能、更节能的边界线信号解决方案,带来更舒适便捷的庭院管理体验。 。